
工学研究科、ロボティクス専攻、ニューロロボティクス分野 (Graduate School of Engineering, Department of Robotics)
医工学研究科、生体機械システム医工学講座(兼任)concurrently with Graduate School of Biomedical Engineering (Biomechanical Engineering)

Neuro-Robotics Lab Members
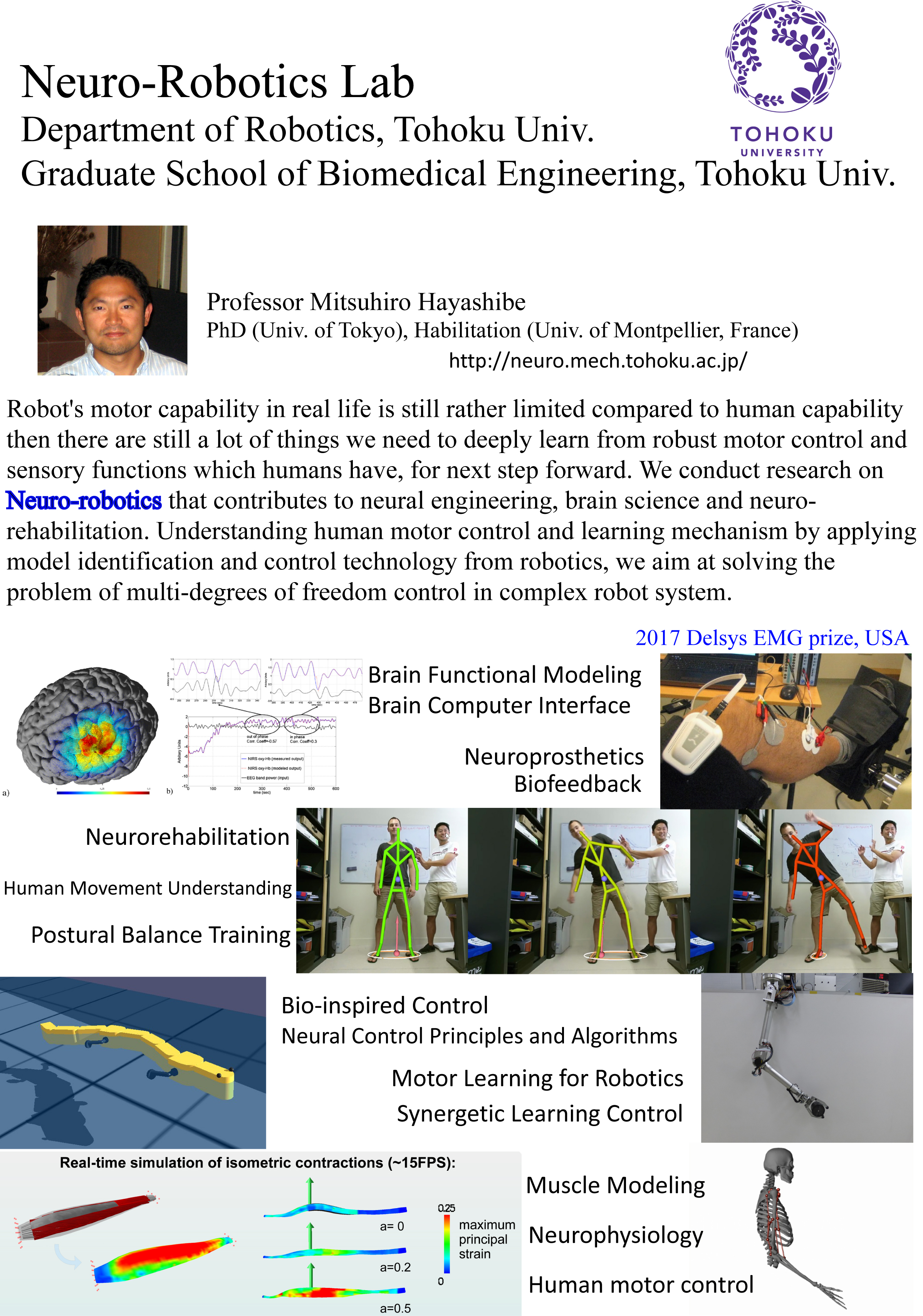
- Mitsuhiro Hayashibe (林部充宏) Professor, PhD (Univ. of Tokyo), Habilitation degree (Univ. of Montpellier, France)



Habilitation Thesis (フランス教授資格), Univ. of Montpellier (English, to download) 「Computational Modeling and Control for Personalized Neuroprosthetics and Rehabilitation」
Recent awards: Toyota Riken Scholar, 2019
Delsys Prize for Innovation in Electromyography, USA, 2017 (Unique Japanese recipient)
Recent Responsibility: Senior Editor for IROS18, IROS19, IROS20
IFRR Technical Activity Board Member
計測自動制御学会(SICE) 東北支部長(Head of Tohoku Branch) 2022,2023
Qualifications(資格):
Deep Learning Generalist(ディープラーニングジェネラリスト), 2020 (JDLA)
グッドデザイン賞 (Good Design Award), ハイテクナビゲーション手術室(東京慈恵会医科大学第三病院設置, Image), 2005
第一種情報処理技術者 (Class I IT Engineer), 2000 (Authorized by IPA)
EIT (Engineer In Training Authorized by National Society of Professional Engineers), 1998 (Oregon State, USA)
- Dai Owaki (大脇大) Associate Professor, PhD (Tohoku Univ.)
Recent awards: Distinguished researcher, 2020
Young Scientists’ Award (MEXT), 2020
- Kyo Kutsuzawa (沓澤京) Assistant Professor, PhD
Recent awards: Advanced Robotics Paper Awards -Excellent Paper Award-, 2020
- Shino Sato (佐藤志乃) Secretary for every Monday and Wednesday
学生 (Students):
Guanda Li, D3, IMAC-G (IBP) ![]()
![]()
Yan Guo (from Zhejiang University, 浙江大学) D3 ![]()
![]()
Taku Sugiyama (杉山 拓) D2 ![]() (国際共同大学院) JSPS DC2
(国際共同大学院) JSPS DC2
Chatrin Phunruangsakao (from Thammasat Univ.) D2 ![]() , Bio-Eng (DSPII, 医工学研究科)
, Bio-Eng (DSPII, 医工学研究科)
Youchun Ma (from BIT, China) D2 ![]()
![]() with U. HongKong
with U. HongKong
Yuchen Wang D2 ![]()
![]() (国際共同大学院) JSPS DC2
(国際共同大学院) JSPS DC2
Akito Fukunishi (福西彬仁) D2 ![]() (国際共同大学院)
(国際共同大学院)
Shunsuke Koseki (古関駿介) D1 ![]() (国際共同大学院) JSPS DC1
(国際共同大学院) JSPS DC1
Yuan Tianjian M2 ![]()
![]()
Laurie Azoulay (INSA Lyon, Double Degree) M2 ![]()
![]()
Takaya Hirano (平野 貴也) M2 ![]()
Yuto Tanaka (田中 裕人) M2 ![]()
Yuhei Sorimachi (反町 優平) M2 ![]()
Ryosei Seto (瀬戸 崚生) M2 ![]()
Tetsuhiro Shimoyamada (下山田 徹大) M2 ![]()
Itsuki Yokota (横田 一樹) M2 ![]()
Budsuren (Jam) Jamiyanpurev M1 ![]() , Brain-Computer Interfacing
, Brain-Computer Interfacing
Poraneepan (Pim) Tantawanich (from Thammasat Univ., Thailand) M1 ![]() , Ricta-IMACG, Brain-Computer Interfacing
, Ricta-IMACG, Brain-Computer Interfacing
Eymeric Chauchat (Ecole Central Lyon, Double Degree) M1 ![]()
![]()
Shuto Hino (日野衆斗) M1 ![]()
Keisuke Goto (後藤啓佑) M1 ![]()
Hiroki Kitahara (北原寛) M1 ![]()
Aoi Nakayama (中山藍維) M1 ![]()
Tatsuya Kenmochi (剣持竜也) M1 ![]()
Jerome Monsanto B4 ![]()
長塚一真 B4 ![]()
寒川耀一 B4 ![]()
鈴木俊輔 B4 ![]()
松嶋惠太 B4 ![]()
平出駿 B4 ![]()
石井創太 B3 ![]() (9月早期卒業予定)
(9月早期卒業予定)
北尾政憲 B3 ![]()
菅原雄一 B3 ![]()
山本透馬 B3 ![]()
Hidayat Yumaa Fadhil Naufal B3 ![]()
研究生(Research Student):
Zhiting Yao, Doctor Exchange Student, ![]()
![]() (東南大学、中国)
(東南大学、中国)
Ondrej Kopecky, Colabs Student, ![]() (Czech Republic)
(Czech Republic)
Ningquan Gu, ![]()
![]() (from July)
(from July)
 Group photo 2023
Group photo 2023
 Group photo 2022
Group photo 2022
 Group photo 2021
Group photo 2021

In processing to start from 2024 Oct.:
Irfan Tito Kurniawan, ![]() (Doctor)
(Doctor)
Zhongkai Gu,![]()
![]() (Doctor)
(Doctor)
Feroz Fernando, ![]() (Master)
(Master)
Xinyu Song, ![]()
![]() (Master)
(Master)
研究生(Research Student):

{kind=link}
{kind=link}